Pokyny pro organizátory #
Tento motivační wokshop s MicroPythonem potřebuje speciální hardware. Tady je popsáno, jak jsme všechno připravili.
Nákupní seznam #
- NodeMCU Devkit v2
- Dá se koupit z Číny, např. z Aliexpressu.
- Malé nepájivé pole (Mini Breadboard)
- Dá se koupit z Číny, např. z Aliexpressu.
- Modul s tlačítkem
- Dá se koupit z Číny, např. z Aliexpressu.
- Modrá LED (Uf=3,3V)
- Dá se koupit z Číny, nebo např. v GME.
- Pásek s 8 LED moduly WS2812 s konektorem
- Dá se koupit po metrech z Číny, např. v Aliexpressu, rozstříhat, a napájet na konektory – opět např. z Aliexpressu.
- Malý servomotor, např. TowerPro SG92R
- Dá se koupit z Číny, např. v Aliexpressu.
- Spojovací drátky
- Opět se dají koupit z Číny, např.
v Aliexpressu.
Jsou potřeba takové, aby se jimi dal připojit LED pásek a motorek k nepájivému poli. - MicroUSB kabel
- Jak pro mobil. Doporučuji koupit kvalitní datový kabel. Případně si můžou účastníci donést vlastní, je ale dobré jich mít pár v zásobě, kdyby si přinesli nedatový kabel od nabíječky.
- Počítač
- Je potřeba i „velký“ počítač – hlavně kvůli obrazovce a klávesnici. Viz nastavení níže.
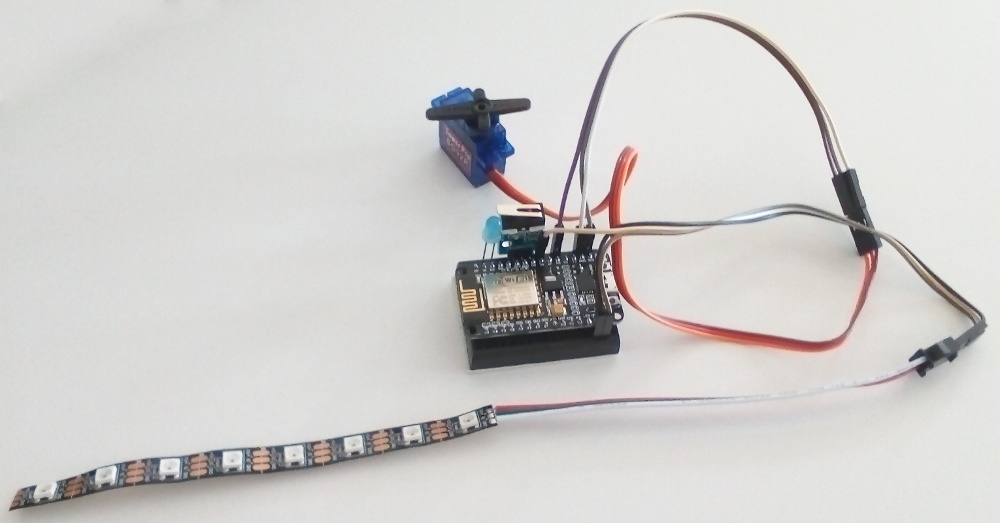
Příprava hardwaru #
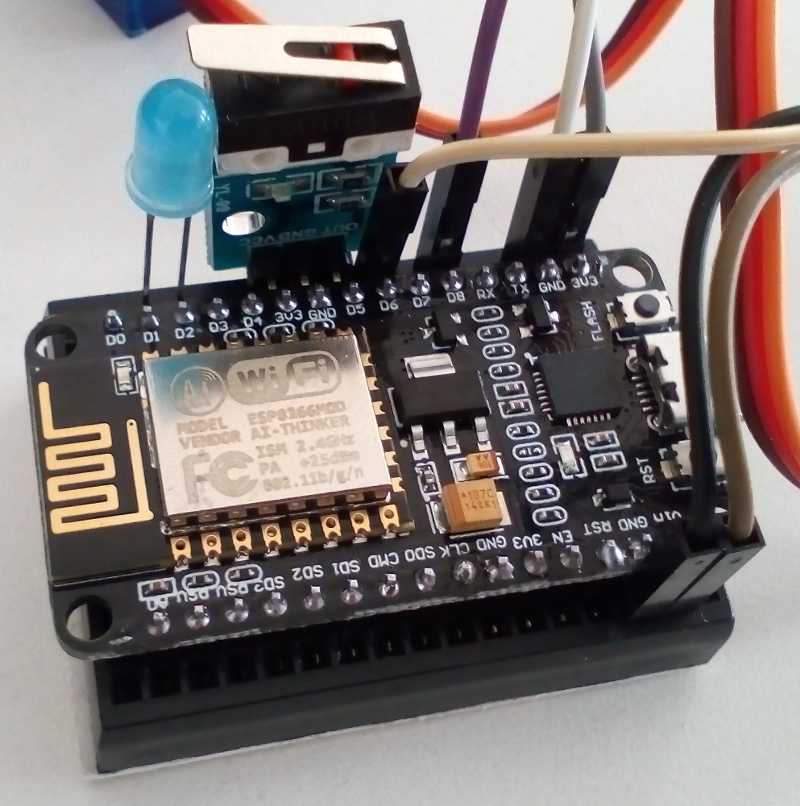
NodeMCU zasuň do nepájivého pole, aby na každé delší straně zbyla řada dírek. Do nich zapoj komponenty:
| Pin | – Součástka |
| --: | :---------------------------- |
| D1 | – Anoda LED (delší nožička) |
| D2 | – Katoda LED (kratší nožička) |
| 3V3 | – VCC tlačítka |
| GND | – GND tlačítka |
| D5 | – OUT tlačítka |
| D6 | – DI LED pásku |
| D8 | – Data servomotoru |
| GND | – GND servomotoru |
| 3V3 | – VCC servomotoru |
| GND | – GND LED pásku |
| Vin | – +5V LED pásku |
Nejsou-li vstupy servomotorku označené, bývá červený VCC, hnědý GND, zbylý Data.
Příprava počítače #
Na workshop doporučujeme použít počítače s Fedorou Workstation 25. Pár věcí je potřeba nastavit:
Uživatel musí být členem skupiny
dialout:$ sudo usermod -a -G dialout $(whoami) $ su - $(whoami)
(Po tomto nastavení je potřeba se přihlásit a znovu odhlásit, případně v každém terminálu zadat
su - $(whoami).)Musí být nainstalované balíčky
picocomaampy:$ sudo dnf install picocom ampy
(Na jiných systémech nemusí být
ampyv systémových repozitářích. V takovém případě se dá nainstalovat pomocípython3 -m pip install --user adafruit-ampy.)Aplikace Terminal (
gnome-terminal) a Textový editor (gedit) jsme dali do oblíbených položek v GNOME. (Klávesa Super – na klávesnici napsat Terminal – přetáhnout ikonku do levého proužku. Zopakovat pro Gedit.)Textový editor jsme nastavili pro Python: odsazování čtyřmi mezerami, ukazování čísel řádků. Podrobněji viz náš návod pro začátečníky.
Nastavili jsme možnost výběru české/anglické klávesnice. (Ikonka v pravém horním rohu obrazovky – ikonka s klíčem a šroubovákem – Regional Settings)
Firmware #
K flashování je potřeba stáhnout binární obraz MicroPythonu pro ESP8266 a náš předpřipravený začátečnický soubor boot.py.
Potřebné nástroje, esptool a ampy, můžeme na Fedoře nainstalovat z balíčků:
$ sudo dnf install esptool ampy
Na systémech, kde tyto nástroje v systémových balíčcích nejsou, se dají nainstalovat do virtuálního prostředí:
$ python3 -m venv venv
$ . venv/bin/activate
(venv)$ python -m pip install esptool adafruit-ampy
Připojíme NodeMCU přes USB a pomocí esptool ho naflashujeme:
(venv)$ esptool.py --port /dev/ttyUSB0 erase_flash
(venv)$ esptool.py --port /dev/ttyUSB0 --baud 460800 write_flash 0 esp8266-20161110-v1.8.6.bin
(Kdyby neexistovalo zařízení /dev/ttyUSB0, ve výstupu dmesg | tail se dá
dohledat, kam se NodeMCU připojilo. V takovém případě ale bude potřeba změnit
instrukce k workshopu.)
Nakonec na NodeMCU stiskneme tlačítko RST, pustíme a pak nahrajeme boot.py:
(venv)$ ampy -p /dev/ttyUSB0 put boot.py
Soubor boot.py obsahuje testovací režim pro kontrolu, že je vše nahráno
správně.
Podržíme-li tlačítko na modulu stisknuté, po resetu (tlačítkem RST nebo
přpojením USB kabelu) se motorek otočí a modrá LED i LED pásek zablikají.
{kind=link}